水下探索技术的突破
科学家们为惯性测量单元(IMU)开发了一种创新的校准算法。该算法利用海底信标的声波信号显着提高了导航精度。这项研究强调了准确有效的导航系统在现代海洋勘探中的至关重要性,为水下探测技术的未来发展提供了宝贵的指导。
水下航行器在探索和了解海洋方面发挥着关键作用,因此需要精确的导航能力。声学长基线(LBL)系统对潜艇定位至关重要,但由于基础设施成本高且部署复杂,其实用性仅限于小范围,因此面临着局限性。这一挑战限制了水下航行器长距离高精度导航的能力。最近在《卫星导航》杂志上发表的
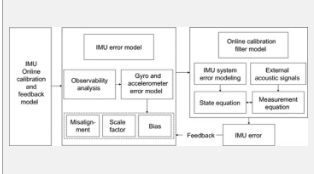
一项新研究(DOI:10.1186/s43020-023-00126-1)中,山东大学的研究人员开发了一种创新的惯性测量单元(IMU)校准算法,通过声学LBL显着提高导航性能基于校准。 这项开创性研究的核心在于其创新方法克服了传统水下导航方法的局限性。研究人员巧妙地开发了一种校准算法,将海底信标的声学信号与水下航行器上 IMU 的数据相结合。这种集成可以实时校正 IMU 的累积误差,这是精确和扩展水下导航路径中的一个重大障碍。该实验的重点是通过采用声学 LBL 系统来校准 IMU。当车辆位于 LBL 网络内并且可以接收来自海底信标的声学信号时,这些信号用于重新校准 IMU,从而显着减少导航误差。该研究指出陀螺仪和加速计偏差是导致导航不准确的主要原因。通过大量的实验和分析,发现通过所提出的校准方法纠正这些偏差可以显着提高导航精度。 该研究的主要研究员聂文峰博士强调了他们工作的意义,“我们的研究引入了一种利用海底信标的声学信号校准 IMU 的方法,使水下航行器即使在 LBL 网络直接覆盖之外也能保持精度这一突破有望显着扩展水下导航的作战范围和精度。”
这一技术进步预示着水下探索的新时代,为在海洋表面下进行更准确、更可靠和更广泛的操作提供了潜力。这是揭开深海奥秘、实现更安全、更高效的勘探、研究和资源开采活动的关键一步。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。